農学研究院 野口 伸 教授(ビークルロボティクス研究室)
研究の背景・目的
北海道はヨーロッパのシャンパーニュ地方やアルザス地方と同じワイン産地の気候区分に属することから、醸造用ブドウの生産量が全国第3位です。さらに、ブドウを育てるのに最適な条件が揃う地域として、とりわけ北海道への関心が高まっており、全国からの就業希望者も多く、過去10年間でワイナリー数は3倍、現在53のワイナリーがあります。このワイン生産は地方創生の観点でも有効であることから北海道庁はじめ北海道内の自治体はワイン産業の振興に力を入れています。このようなことから地域の農産物や食品をブランドとして登録・保護する制度である「GI制度」によりワイン産地として「北海道」が指定されました。しかし、果樹園は傾斜地が多く疲労が大きく、農薬散布の回数も多いため作業者の健康被害も懸念されます。またブドウ栽培には熟練の技術を必要とし、品質の高いブドウを栽培するには長い栽培経験が必要であり、ブドウ農家として自立するのも容易でありません。
このような状況を打破すべく、2021年度から生研支援センターの研究開発事業であるイノベーション創出強化研究推進事業・開発研究ステージ(実用化研究型)の「電動ロボットによるスマートぶどう栽培システムの開発」として5ヵ年の研究開発を進めています。研究開発コンソーシアムは北海道大学が代表機関を務め、共同研究機関として北見工業大学、道総研中央農業試験場、北海道ワイン株式会社、東日本電信電話株式会社(NTT東日本)、豊田通商株式会社、株式会社三菱総合研究所が参画し、北海道庁、北海道経済連合会、関連企業に協力機関として研究開発の支援をいただいています。
研究の内容
本プロジェクトはサイバー空間とフィジカル空間を明確に定義して、その融合と循環であるサイバーフィジカルシステム(CPS)を基礎として、下記の5項目に注力して果樹作業のスマート体系を目指しています。
1)フィジカル空間の構築:「草刈作業」、「防除作業」、「園内見回り」、「収穫作業」、「運搬作業」、「せん定作業」など主要な作業群の電動車両(EV)による自動化(図1)
2)フィジカル空間の構築:スペクトルセンサをEVロボットやドローンに搭載したリモートセンシングにより、品質などの検出、気象情報の収集・蓄積と解析を行うAI分析基盤
3)サイバーとフィジカルの融合:サイバー空間におけるデータ解析により生成された最適化された作業スケジュール・内容をロボットがフィジカル空間において実行
4)人間中心のシステム設計:人とロボットが協働するシステム開発を行う。生産性、作業性の向上、コスト削減とともに作業を行う人の「達成感」、「充実感」、「満足感」を重視
5)ビジネスモデルの複線化:開発技術の国内外での普及を念頭に、様々なユーザー特性に適合した適切なビジネスモデルを提案
プロジェクトの目指すスマート果樹生産システムは、単純な自動化技術でない知能化された自動化システムであること、人との協働を積極的に取り入れたシステム設計であることが特長です。
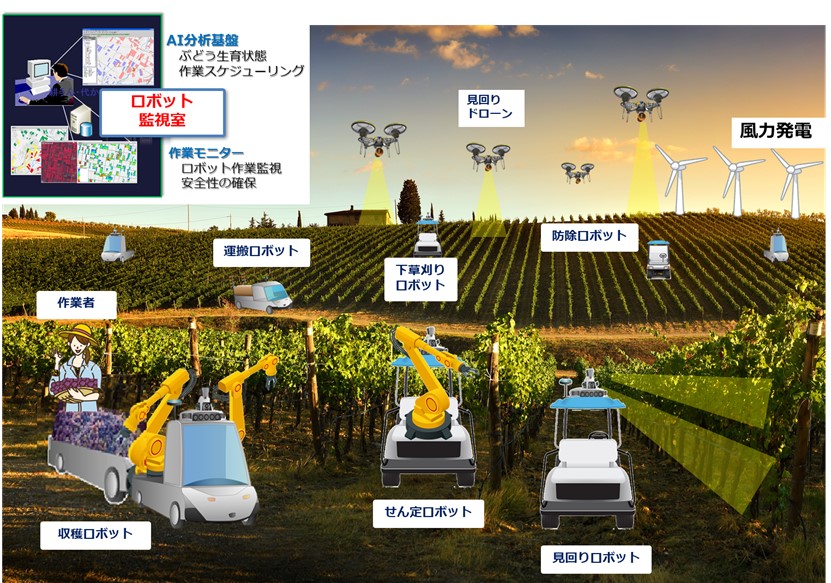
図2は最終的なスマート化された栽培システムを描いたものです。本プロジェクトでは垣根仕立ての醸造用ブドウと省力樹形を導入した生食用ブドウを対象としています。また収穫やせん定のような高度な技術を必要とする作業については人とロボットの協働による新しい自動化システムを提案します。ブドウ生育・品質を非破壊で検出できるセンサ開発、ブドウ栽培のデータを集約して解析するAI分析基盤の構築や太陽光発電・風力発電による作業のゼロエミッションなどの技術開発を進めます。
プロジェクトの第一目標は北海道そして国内のワイン産業の振興にあるので開発機器の低価格化を図る必要があります。また、EVロボットを広く利用いただくために新ビジネスとして作業受託・リース事業をおこなうことを想定しています。NTT東日本の事業としてロボット監視室とAI分析基盤を運用して、ブドウ栽培のスマート化をサービス事業として推進していく計画です。
期待される成果
本プロジェクトの開発技術によって、果樹栽培で慢性的な労働力不足と技術を有した作業者の漸減という課題が解消されます。果樹生産の「無人化」、「経験・勘からデータ活用」、「ゼロエミッション」を念頭に置いたIoT、ビッグデータ、AI、ロボットによって構成された栽培支援システムの開発を目標として、「下草刈作業」、「防除作業」、「果樹園見回り」、「収穫作業」、「運搬作業」、「せん定作業」などブドウ栽培におけるほぼすべての作業が体系化・統合化されたスマート営農システムが世界で初めて実現します。