農学研究院 野口 伸 教授(ビークルロボティクス研究室)
研究の背景・目的
日本農業の労働力不足は厳しい状況に置かれています。例えば基幹的な農業従事者は5年前と比べると15%減っています。高齢化も進んでおり、現在の農家の平均年齢は68歳、65歳以上の農家が65%にも及びます。今後ロボットを含めた超省力技術の開発が、日本農業を持続させる上で必須です。他方、世界に目を転じると世界人口は2050年には98億人になり、その時の食料需要は現在の60%増との推計があり、今後世界の食料の需給バランスは崩れ、食料不足になるとされ、国際的にもロボット化のニーズは高いです。日本政府は農業の自動化・ロボット化を政策として推進したことにより、我が国のロボット農機の現場実装は世界に先立ち2018年に始まりました。現状では自動化レベル2と呼ばれるロボット農機が市販されていますが、これは使用者が圃場内や圃場周辺からロボット農機の作業を監視することが前提です。自動化レベル3は遠隔監視・圃場間移動可能なロボットシステムで、無線ネットワークの高度利用が必須となります。この自動化レベル3の実現に向けて、ビークルロボティクス研究室は日本電信電話株式会社(NTT)と共同研究を行っています。
研究の内容
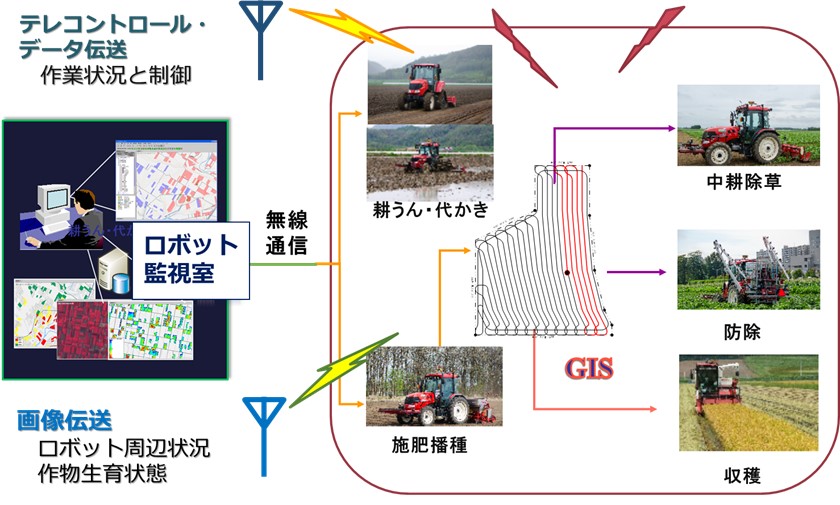
遠隔監視によるロボット作業システムは基本的に図1のような地域内で複数のロボットに同時作業させるシステムで、ロボット監視室にいる1人のオペレータが離れた複数の畑で作業しているロボットを管理することができます。この場合、作業監視のために2種類の通信系を必要とします。1つはテレコントロール・データ伝送で、ロボットの作業データを伝送する機能と監視室からロボットを制御する機能を担う通信系です。この無線通信は作業の安全性を確保する上で重要です。もう一つはロボット周辺の映像伝送です。ロボットの作業状況を視覚で把握できる機能の意義は大きいです。慣行の人による農作業では耕うんの仕上がりや作物生育状態を常に観察しているわけで、この圃場状況の映像伝送機能は農作業を行うロボットにとって必要といえます。しかし、現状ではロボット作業の遠隔監視に適した無線通信技術が確立されていないため、安全な遠隔監視ロボットの実現には課題が残されています。ちなみに図2は研究・実証用に岩見沢市に設置されているロボット監視センターです。
現在実用化されている目視監視型から遠隔監視型に発展させる上で最も重要な課題は安全性の確保です。無線通信の品質は端末の周囲の電波環境やネットワーク混雑等の影響により流動的に変化し、安定しない場合があります。このような課題に対して、複数のアクセスを準備し、品質が劣化する前により安定した無線アクセスに切り替える、あるいは、劣化する前に映像の伝送レートを下げる、ロボット農機の走行速度を下げて安全を確保するなど、品質を予測しプロアクティブに制御することが有効です。また、ロボット側では、障害物検出と衝突回避性能が無線通信の品質変動によって影響されないよう多層化された安全対策を施す必要があります。現在、ビークルロボティクス研究室とNTTではロボット農機と無線通信の両面から実用に耐えられるロボット農機の遠隔監視システムの研究開発を進めています。
期待される成果と課題
ロボット1台は労働者1人に相当し、人手不足の解消に有効であることは明白です。実際にはロボットは昼夜を問わず24時間連続作業ができ、その労働生産性は2~3人の労働力に匹敵します。さらに遠隔監視型のロボットシステムの場合、ロボット監視室にいる1人のオペレータが数十のロボットに同時作業させることができ、労働生産性は格段に向上します(図3)。今後ロボット技術は国際市場を念頭におき、しかも要素技術の共通化を図ることで製造コストの削減に努める必要があります。また、当然通信セキュリティの確保も重要です。さらに、生産者間のロボット農機の共同利用など共有・共用を基軸した新しいロボット農機の使用形態構築も必要になるでしょう。