
シーズ集
SLAM技術による移動ロボットの知能化



シーズの概要
ロボットが未知環境を自律的に移動するためにはSLAM問題、すなわち「地図を作成・更新する技術」と「地図中における自己位置同定」を同時に解決する必要がある。我々は屋内環境における2次元・3次元SLAMの解決を行い、屋外環境への拡張を試みている。
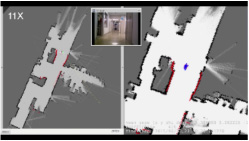
2次元SLAMの例
アピールポイント
トラクタの自動運転が実現に向かっているが、SLAM技術に基づく自律的な環境地図の作成・更新により、除草・収穫作業のさらなる省力化、効率化が実現可能。
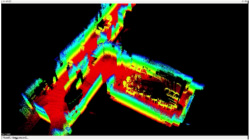
3次元SLAMの例
活用例
自律的な移動は様々な作業の基礎となる重要な技術である。また農業のみならず林業への応用も可能である。

ロボットベース
関連する論文等
- Ravankar, A., Ravankar, A.A., Emaru, T., Kobayashi, Y., Algorithms and a Framework for Indoor Robot Mapping in a Noisy Environment using Clustering in Spatial and Hough Domains, Int. J. Advanced Robotic Systems, Vol. 12, No. 27, DOI: 10.5772/59992, 2015.
本シーズに関するお問い合わせはネットワーク事務局まで